应用程式中可用的参数。
命名空间:IntervalZero.KINGSTAR.Base
组合: IntervalZero.KINGSTAR.Base (于 IntervalZero.KINGSTAR.Base.dll) 版本:4.4.0.0
语法
public enum McAxisParameterPublic Enum McAxisParameter成员
PLCopen 标准
- KINGSTAR 存在软体极限值,可防止插补发送超过这个目标的值,而伺服驱动器本身不会更动,但其会影响 KINGSTAR Motion (非总线)控制伺服驱动器的方式。
- 软体极限在主控设备插补模式与直接速度模式中永远有效,使用者可选择是否在从属设备控制模式(如从站原点复归与原点复归过程)关闭这个功能,而软体极限不使用于手动模式(也就是总线套件)。
| 名称 | 值 | 资料型别 | R/W | 定义 |
|---|---|---|---|---|
| mcCommandedPosition | 1 | double | R | 命令位置。 |
| mcSoftLimitPositive | 2 | double | R/W | 正软体极限开关位置,若命令值大于此值,轴将向前移动,直到达到软体极限开关后停止。 |
| mcSoftLimitNegative | 3 | double | R/W | 负软体极限开关位置,若命令值小于此值,轴将向后移动,直到达到软体极限开关后停止。 |
| mcEnableLimitPositive | 4 | double | R/W | 启动正软体极限开关。 |
| mcEnableLimitNegative | 5 | double | R/W | 启动负软体极限开关。 |
| mcEnablePosLagMonitoring | 6 | double | R/W | 启动位置延迟监控(跟随误差)。 |
| mcMaxPositionLag | 7 | double | R/W | 最大位置误差(跟随误差)。 |
| mcMaxVelocitySystem | 8 | double | R/W | 运动系统中轴的最大速度。 |
| mcMaxVelocityApplication | 9 | double | R/W | 应用程式中轴的最大速度。 |
| mcActualVelocity | 10 | double | R | 实际速度。 |
| mcCommandedVelocity | 11 | double | R | 命令速度。 |
| mcMaxAccelerationSystem | 12 | double | R | 运动系统中轴的最大加速度。 |
| mcMaxAccelerationApplication | 13 | double | R/W | 应用程式中轴的最大加速度。 |
| mcMaxDecelerationSystem | 14 | double | R | 运动系统中轴的最大减速度。 |
| mcMaxDecelerationApplication | 15 | double | R/W | 应用程式中轴的最大减速度。 |
| mcMaxJerkSystem | 16 | double | R | 运动系统中轴的最大加加速度。 |
| mcMaxJerkApplication | 17 | double | R/W | 应用程式中轴的最大加加速度。 |
轴配置
| 名称 | 值 | 资料型别 | R/W | 定义 |
|---|---|---|---|---|
| mcAlias | 1001 | double | R/W | 轴别名。 |
| mcInterpolationTime | 1002 | double | R/W |
设定轴的插补时间(单位:秒)。 注意:由于目前不支援更新轴插补周期的功能,因此无法设定此参数。 |
| mcAvailableControlModes | 1003 | double | double | 轴可用的控制模式。 |
| mcControlMode | 1004 | double | R/W | 在运行时改变轴的控制模式,此控制模式必须与当前存取模式相容,非所有轴都支援在运作时更改控制模式。 |
| mcHomeSwitchModuleType | 1005 | double | R/W | 配置原点回归感测器,当感测器连接到轴输入,设为 TRUE;若连接到 I/O 模组,设为 FALSE 。 |
| mcHomeSwitchModuleIndex | 1006 | double | R/W | 配置原点回归感测器,其识别何 I/O 模组或轴内含感测器,别名将影响此参数。若无分配的感测器则值为 -1。 |
| mcHomeSwitchOffset | 1007 | double | R/W | 配置原点回归感测器。在 I/O 模组输入缓冲区的数位输入偏移量。 |
| mcHomeSwitchInvert | 1008 | double | R/W | 配置原点回归感测器,其决定是否倒转感测器值。 |
| mcPositiveLimitSwitchModuleType | 1009 | double | R/W | 配置最大极限感测器,当感测器连接到轴输入,设为 TRUE;若连接到 I/O 模组,设为 FALSE 。 |
| mcPositiveLimitSwitchModuleIndex | 1010 | double | R/W | 配置最大极限感测器,其识别何 I/O 模组或轴内含感测器,别名将影响此参数。 |
| mcPositiveLimitSwitchOffset | 1011 | double | R/W | 配置最大极限感测器,在 I/O 模组输入缓冲区的数位输入偏移量。 |
| mcPositiveLimitSwitchInvert | 1012 | double | R/W | 配置最大极限感测器并倒转感测器值。 |
| mcNegativeLimitSwitchModuleType | 1013 | double | R/W | 配置最小极限感测器,当感测器连接到轴输入,设为 TRUE;若连接到 I/O 模组,设为 FALSE 。 |
| mcNegativeLimitSwitchModuleIndex | 1014 | double | R/W | 配置最小极限感测器,其识别何 I/O 模组或轴内含感测器,别名将影响此参数。 |
| mcNegativeLimitSwitchOffset | 1015 | double | R/W | 配置最小极限感测器,在 I/O 模组输入缓冲区的数位输入偏移量。 |
| mcNegativeLimitSwitchInvert | 1016 | double | R/W | 配置最小极限感测器,其决定是否倒转感测器值。 |
| mcSoftwareLimitPositive | 1017 | double | R/W | 轴的正软体极限。 |
| mcSoftwareLimitNegative | 1018 | double | R/W | 轴的负软体极限。 |
| mcEnablePositiveLimitSwitch | 1019 | double | R/W | 启用或停用最大极限感测器。 |
| mcEnableNegativeLimitSwitch | 1020 | double | R/W | 启用或停用最小极限感测器。 |
| mcEnableSoftwareLimitPositive | 1021 | double | R/W | 启用或停用正软体极限开关。 |
| mcEnableSoftwareLimitNegative | 1022 | double | R/W | 启用或停用负软体极限开关。 |
| mcEnableFollowingErrorMonitoring | 1023 | double | R/W | 启用或停用监控跟随误差。 |
| mcCountPerUnitNumerator | 1024 | double | R/W | 将使用者定义位置单位的转换比率设定为轴使用的脉冲单位,其用来转换驱动器单位至使用者单位,例如,若装置为编码器,则通常分子是编码器的解析度。 |
| mcCountPerUnitDenominator | 1025 | double | R/W | 将使用者定义位置单位的转换比率设定为轴使用的脉冲单位,其用来转换驱动器单位至使用者单位,例如,若使用度数,因一旋转为 360 度,则值将为 360。 |
| mcCountPerUnitReverse | 1026 | double | R/W | 反转伺服马达的旋转方向。 |
| mcSecondaryCountPerUnitNumerator | 1027 | double | R/W | 将使用者定义位置单位的转换比率设定为轴使用的脉冲单位,其用来转换驱动器单位至使用者单位,例如,若装置为编码器,则通常分子是编码器的解析度。 |
| mcSecondaryCountPerUnitDenominator | 1028 | double | R/W | 将使用者定义位置单位的转换比率设定为轴使用的脉冲单位,其用来转换驱动器单位至使用者单位,例如,若使用度数,因一旋转为 360 度,则值将为 360。 |
| mcSecondaryCountPerUnitReverse | 1029 | double | R/W | 反转伺服马达的旋转方向。 |
| mcPosToVelRatio | 1030 | double | R/W | 将速度从每秒计数转换为伺服驱动器使用的单位。 |
| mcTorquePolarityReverse | 1031 | double | R/W | 反转轴的扭矩方向。 |
| mcRealUnitConversion | 1032 | double | R/W | 设定轴使用真实单位或脉冲单位。 |
| mcActualFollowingError | 1033 | double | R/W | 当前跟随误差。 |
| mcEnablePositiveDirection | 1034 | double | R/W | 启用正方向。 |
| mcEnableNegativeDirection | 1035 | double | R/W | 启用负方向。 |
| mcModuloAxisValue | 1085 | double | R/W |
为模数轴设定模数值,例如 360°。预设值为 uint.MaxValue。 若函式执行成功,则回传 errNoError;若函式执行失败,则回传其中一个错误:
|
| mcEnableModuloAxis | 1086 | double | R/W |
启用或停用模数轴。启用此参数后需设定模数值,否则将使用预设模数值 uint.MaxValue。 若函式执行成功,则回传 errNoError;若函式执行失败,则回传其中一个错误:
|
运动与 PID
现有 KINGSTAR 版本不支援 mcJolt。
| 名称 | 值 | 资料型别 | R/W | 定义 |
|---|---|---|---|---|
| mcMotionProfileType | 1036 | double | R/W | 设置轴的加速度与加加速度参数单位。 |
| mcMinimumFollowingError | 1037 | double | R/W | 最小跟随误差。若目标位置与实际位置间的距离较此值小,则轴将被视为在目标位置而运动将停止。 |
| mcMaximumFollowingError | 1038 | double | R/W | 最大跟随误差。 |
| mcMaximumVelocity | 1039 | double | R/W | 插补所使用的最大速度。 |
| mcAcceleration | 1040 | double | R/W | 插补的最大加速度。 |
| mcDeceleration | 1041 | double | R/W | 插补的最大减速度。 |
| mcJerk | 1042 | double | R/W | 插补的最大加加速度。 |
| mcJolt | 1043 | double | R/W | 插补的最大加加加速度。 |
| mcFeedbackDelay | 1044 | double | R/W | 回馈延迟发生在 KINGSTAR 传送指令与从伺服驱动器接收结果之期间,为确保轴到达目标位置(或速度、扭矩),KINGSTAR 会将实际位置与前几周期传送的命令位置做比较。FeedBackDelay 为 KINGSTAR 回溯周期的数量,通常为 3 个周期。 |
| mcVelocityKP | 1045 | double | R/W | 速度模式中的比例增益。 |
| mcVelocityKI | 1046 | double | R/W | 速度模式中的积分增益。 |
| mcVelocityKILimitPercent | 1047 | double | R/W | 最大输出中的最大积分误差(单位为百分比)。例如当最大速度为 50、KILimitPercent 为 10,则速度的最大积分误差为 5%。 |
| mcVelocityKD | 1048 | double | R/W | 速度模式中的微分增益。 |
| mcVelocityKV | 1049 | double | R/W | 速度模式中的速度前馈增益。 |
| mcVelocityKAA | 1050 | double | R/W | 速度模式中的加速度前馈增益。 |
| mcVelocityKAD | 1051 | double | R/W | 速度模式中的减速度前馈增益。 |
| mcVelocityKJ | 1052 | double | R/W | 速度模式中的加加速度前馈增益。 |
| mcVelocityReducedGainsDelay | 1053 | double | R/W | 决定完成运动后轴何时开始使用 mcVelocityRgFactor(单位:秒)。 |
| mcVelocityRgFactor | 1054 | double | R/W | KP、KI 和 KD 会在 mcVelocityReducedGainsDelay 后乘上此倍数。 |
| mcVelocityKIStoppedOnly | 1055 | double | R/W | 在速度模式中使用 KI 修正稳态误差 (steady-state error)。 |
| mcVelocityKDUseSecondEncoder | 1056 | double | R/W | 在速度模式中为 KD 使用内部位置编码器。 |
| mcVelocityMinimumOutput | 1057 | double | R/W | PID 之最小输出。最小速度。 |
| mcVelocityMaximumOutput | 1058 | double | R/W | PID 之最大输出。最大速度。 |
| mcTorqueKP | 1059 | double | R/W | 扭矩模式中的比例增益。 |
| mcTorqueKI | 1060 | double | R/W | 扭矩模式中的积分增益。 |
| mcTorqueKILimitPercent | 1061 | double | R/W | 最大输出中的最大积分误差(单位为百分比)。例如当最大扭矩为 50%、KILimitPercent 为 10%,则最大积分误差为扭矩的 5%。 |
| mcTorqueKD | 1062 | double | R/W | 扭矩模式中的微分增益。 |
| mcTorqueKV | 1063 | double | R/W | 扭矩模式中的速度前馈增益。 |
| mcTorqueKAA | 1064 | double | R/W | 扭矩模式中的加速度前馈增益。 |
| mcTorqueKAD | 1065 | double | R/W | 扭矩模式中的减速度前馈增益。 |
| mcTorqueKJ | 1066 | double | R/W | 扭矩模式中的加加速度前馈增益。 |
| mcTorqueReducedGainsDelay | 1067 | double | R/W | 决定完成运动后轴何时开始使用 mcTorqueRgFactor(单位:秒)。 |
| mcTorqueRgFactor | 1068 | double | R/W | KP、KI 和 KD 会在 mcTorqueReducedGainsDelay 后乘上此倍数。 |
| mcTorqueKIStoppedOnly | 1069 | double | R/W | 在扭矩模式中使用 KI 修正稳态误差 (steady-state error)。 |
| mcTorqueKDUseSecondEncoder | 1070 | double | R/W | 在扭矩模式中为 KD 使用内部位置编码器。 |
| mcTorqueMinimumOutput | 1071 | double | R/W | PID 之最小输出。最小扭矩(单位为百分率%)。 |
| mcTorqueMaximumOutput | 1072 | double | R/W | PID 之最大输出。最大扭矩(单位为百分率%)。 |
|
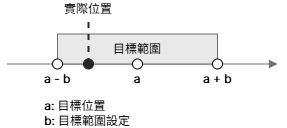
mcMotionStatusFilterDepth |
1083 |
double |
R/W |
设定滤波深度值(以周期数为单位),即实际位置必须持续在目标范围内达到指定周期数。当插补动作完成且条件达成时,动作指令状态将被设定为 Done。 图示范例:
此时的插补动作已完成,且轴的实际位置处于目标范围内,因此动作状态滤波器开始计数。当计数达到设定的滤波深度值后,动作指令状态将被设定为 Done。 |
|
mcFollowActPosDuringPowerOn |
1084 |
double |
R/W |
设定轴在启动过程中的目标位置是否应跟随实际位置。 设为 TRUE 以使目标位置于启动过程中跟随实际位置;设为 FALSE (预设)以于启动过程中固定目标位置。 |
原点复归 (Homing)
| 名称 | 值 | 资料型别 | R/W | 定义 |
|---|---|---|---|---|
| mcSlaveHomeOffset | 1073 | double | R/W | 原点位置与原点感测器间的偏移量。 |
| mcSlaveHomingMode | 1074 | double | R/W | 选择一个伺服驱动器所提供的原点复归模式。 |
| mcSlaveControlLimit | 1075 | double | R/W | 使用从站插补 (modeSlaveInt) 控制模式与 homingSlave 模式时,决定是否使用限制(如软体和感测器限制)。 |
| mcCancelHome | 1076 | double |
R W |
读取-回传 IsHomed 讯号(旗标)。 写入-TRUE:取消 IsHomed 讯号;FALSE:不执行任何动作。 |
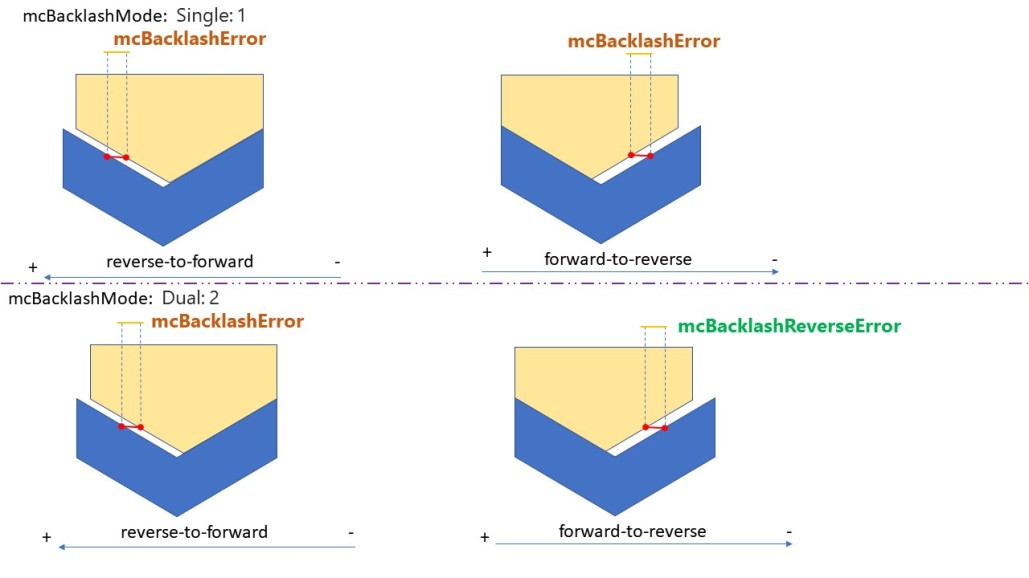
背隙补偿
背隙是由齿轮和滚珠螺杆之间的空隙引起的,由于齿轮间具有小间隙导致在切换旋转方向时造成位置误差。
| 名称 | 值 | 资料型别 | R/W | 定义 |
|---|---|---|---|---|
| mcBacklashMode | 1077 | double | R/W |
0:无背隙补偿。 1:单一误差背隙补偿:从正向到反向与从反向到正向时的背隙误差均相同,此误差是在 2:双误差背隙补偿:从正向到反向与从反向到正向时的背隙误差不相同,补偿反向到正向的误差为 |
| mcBacklashError | 1078 | double | R/W |
单位:使用者单位。 模式 1:包含一个补偿正向到反向或反向到正向的误差。 模式 2:包含一个补偿反向到正向的误差。 |
| mcBacklashReverseError | 1079 | double | R/W | 单位:使用者单位。 包含一个补偿正向到反向的误差。 |
图示
覆盖因子
| 名称 | 值 | 资料型别 | R/W | 定义 |
|---|---|---|---|---|
| mcVelocityFactor | 1080 | double | R/W | 速度的新覆盖因子。 |
| mcAccelerationFactor | 1081 | double | R/W | 加速度或减速度的新覆盖因子。 |
| mcJerkFactor | 1082 | double | R/W | 加加速度的新覆盖因子。 |
参见